La ecuación de balance de momento lineal
La ecuación de balance de momento lineal#
La ecuación de balance de la cantidad de movimiento o momento lineal no es otra cosa más que la expresión de la segunda ley de Newton aplicada a un fluido. Esta ley nos dice que la variación en el tiempo del momento de un cierto cuerpo es igual a la fuerza total que actúa sobre él. Si consideramos un cuerpo de masa
donde
de manera que el momento
Para obtener la ecuación mencionada, partiremos de la forma más común de la segunda ley de Newton que para una partícula de masa
donde
donde
Recordando que la aceleración en un fluido se expresa como
donde
donde debemos especificar la forma explícita de
Fuerzas de cuerpo y fuerzas de superficie
En general, podemos distinguir entre dos tipos de fuerzas que actúan sobre un fluido, las fuerzas de cuerpo o volumen que denotaremos por
Para los problemas que estudiaremos en este curso, la gravedad es la fuerza de cuerpo relevante. Sabemos que para una partícula dicha fuerza tiene la forma
donde
Por otra parte, las fuerzas de superficie son de corto alcance. Son fuerzas de contacto y su origen es molecular, es decir, dependen de la estructura molecular de la materia. Actúan sobre cada elemento de área o superficie, por lo que son dependientes de la forma del cuerpo. Ejemplos de estas fuerzas son la fuerza de presión y la fuerza de fricción que denotaremos por
En general, las fuerzas de superficie son más complicadas de describir matemáticamente que las fuerzas de cuerpo. Por ejemplo, si querermos describir la manera en que actúa la gravedad sobre un cuerpo de forma irregular que cae libremente en la atmósfera, podemos suponer sin problema que la gravedad actúa a través de un único punto conocido como el centro de masa del cuerpo. Así, la gravedad queda completamente determinada a partir de un vector. Sin embargo, si deseamos describir cómo actúan las fuerzas de presión y fricción ejercidas por el aire sobre el mismo cuerpo necesitamos conocer la forma precisa de su superficie, ya que en cada punto dichas fuerzas actuarán de manera diferente, lo que acarrea una complicación matemática adicional.
Las fuerzas de presión y fricción se originan a partir de los esfuerzos mecánicos que ejerce el fluido. Recordemos que un esfuerzo es una fuerza ejercida sobre una superficie determinada y pueden ser normales o cortantes. Los esfuerzos normales actúan de manera normal o perpendicular a la superficie, mientras que los esfuerzos cortantes actúan tangencialmente a la misma. De la experiencia cotidiana sabemos que ante la aplicación de esfuerzos cortantes, por ejemplo, cuando se arrastra una cuchara en un fluido o se intenta deslizar una placa sólida sobre la superficie del mismo, fluidos como la glicerina o el lodo tienen un comportamiento físico distinto del agua y del aire, por tanto, se caracterizan matemáticamente de manera diferente. En otras palabras, cuando se aplica un esfuerzo a un fluido, este responderá deformándose de una manera característica. Es precisamente la relación entre esfuerzos y deformaciones lo que determina el tipo de fluido en cuestión.
En este curso, nos enfocaremos exclusivamente a un grupo de fluidos conocidos como
Para la descripción de las fuerzas de superficie es necesario introducir una cantidad conocida como el tensor de esfuerzos mecánicos que denotaremos por
Los elementos que se encuentran en la diagonal son los esfuerzos normales, mientras que los que están fuera de ella son esfuerzos tangenciales. Una manera de visualizar gráficamente los esfuerzos en un fluido es mediante un volumen de control cúbico como el mostrado en la figura Fig. 32. Notemos que en cada cara del cubo existen dos esfuerzos tangenciales o cortantes y un esfuerzo normal. El primer índice en los elementos del tensor de esfuerzos se refiere a la cara en donde está siendo aplicado, mientras que el segundo índice se refiere a la dirección en que se aplica. Por ejemplo, el esfuerzo cortante
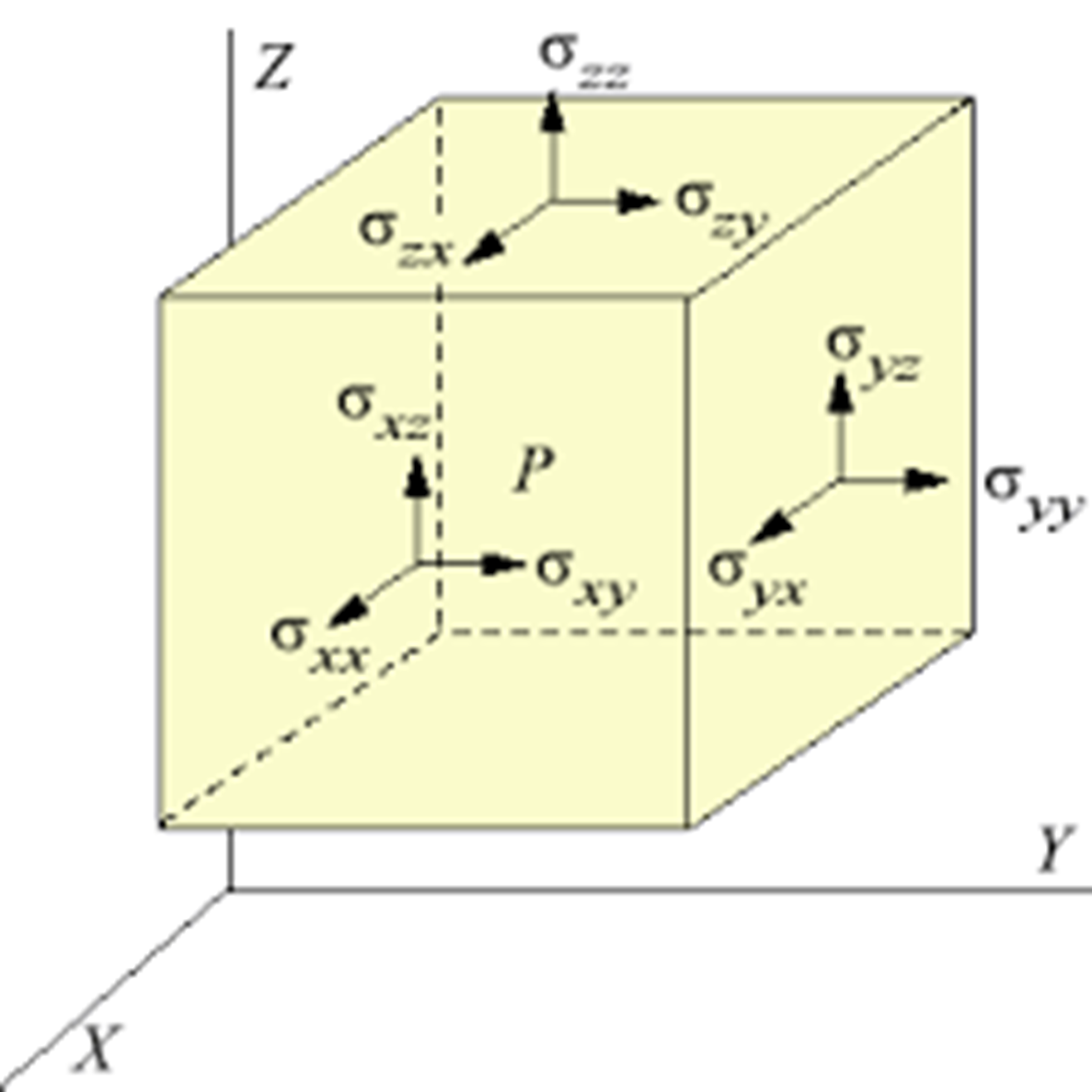
Fig. 32 Componentes del tensor de esfuerzos en las caras de un volumen de control cúbico.#
Veamos cómo podemos determinar la forma explícita de la fuerza de presión. Para esto consideremos un volumen de control fijo en el espacio, como el paralelepípedo mostrado en la figura Fig. 39, cuyos lados son
donde
apuntando en dirección negativa. Sumando estas dos contribuciones obtenemos la fuerza resultante en dirección
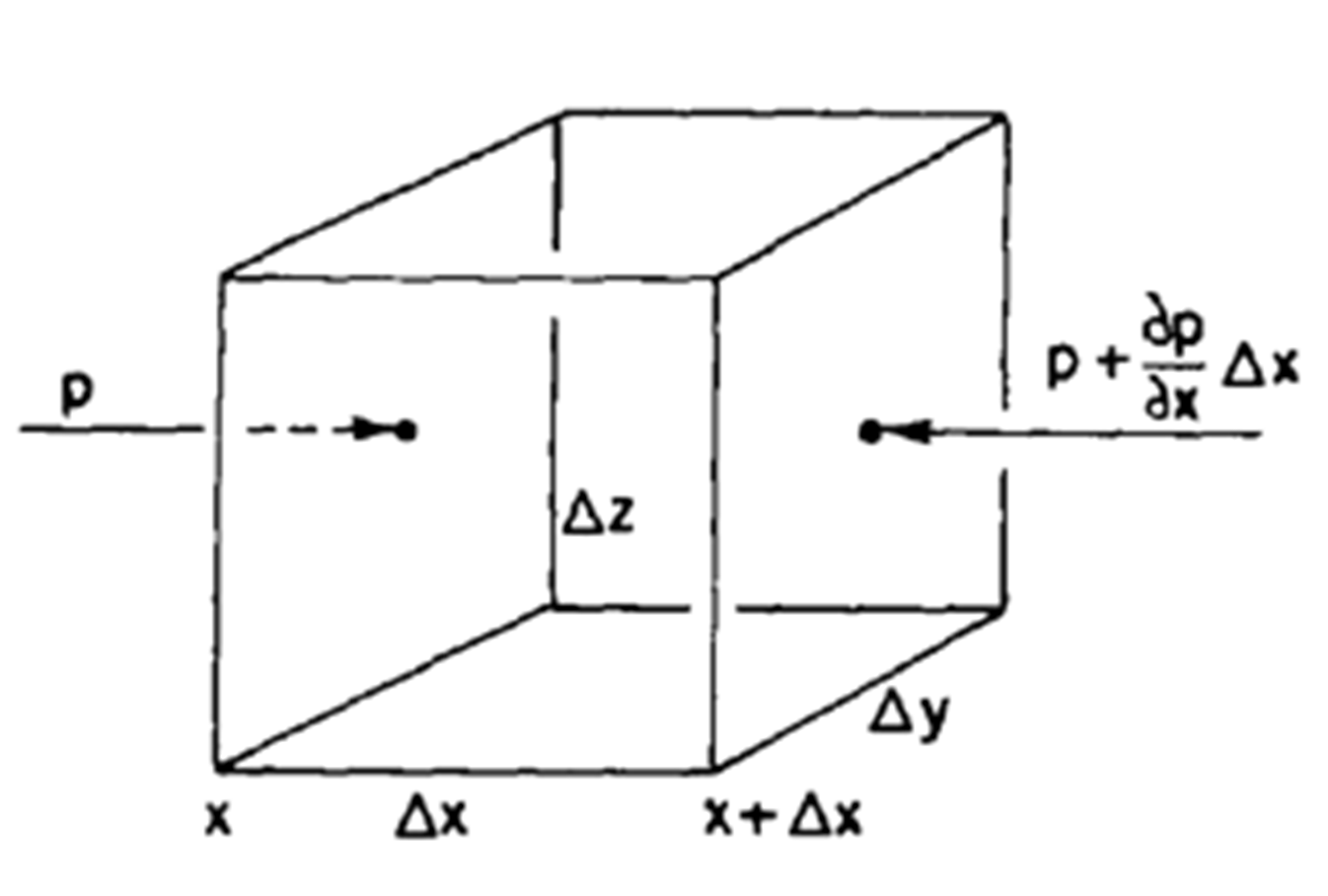
Fig. 33 Presión ejercida por un fluido en las caras de un volumen de control cúbico.#
Haciendo un análisis similar en los dos pares de caras restantes, encontramos que las fuerzas resultantes en las direcciones
Sumando las contribuciones en las tres direcciones, la fuerza de presión total sobre el cubo es
Si denotamos al volumen del cubo como
donde se ha tomado el límite cuando el volumen de control tiende a cero, por lo que en cada punto del fluido la fuerza de presión es
Regresando a la ecuación de balance de momento (47) y sustituyendo explícitamente las fuerzas de cuerpo (gravedad) y presión (ecuaciones (48) y (50), respectivamente), obtenemos:
donde falta especificar la forma explícita de la fuerza de fricción.
La ecuación de Euler: el fluido ideal
Una primera aproximación al estudio del movimiento de los fluidos es suponer que las fuerzas de fricción son despreciables lo que indicaría que la viscosidad del fluido es despreciable o nula. Si la viscosidad es nula, el fluido no pude mojar las paredes con las que está en contacto, es decir, no se adhiere a las superficies sólidas, sino que se desliza sobre ellas. Un fluido con tales características se denomina fluido ideal. Las ecuaciones que gobiernan el movimiento de un fluido ideal compresible son
donde podemos identificar a la ecuación de conservación de la masa (52), mientras que la ecuación (53) se conoce como la ecuación de Euler, que es la expresión de la segunda ley de Newton para un fluido ideal. Notemos que las ecuaciones (52) y (53) forman un sistema de cuatro ecuaciones (una ecuación para la conservación de la masa y tres ecuaciones para el balance de momento) y cinco variables, es decir, la densidad,
que indica la variación de la densidad como función de la temperatura y la presión. Por ejemplo, si el fluido es un gas ideal,la ecuación de estado es
Debe enfatizarse que, un fluido ideal y un gas ideal son conceptos diferentes. A pesar de las simplificaciones, las ecuaciones (52), (53) y (55) permiten describir con una muy buena aproximación diversos problemas de interés, como la transmisión de ondas de sonido en el aire.
Por otra parte, si consideramos un fluido ideal incompresible cuya densidad es constante (
donde tenemos cuatro ecuaciones para cuatro incógnitas, es decir, la presión,
Ley de Newton de los esfuerzos: el fluido Newtoniano
En todos los fluidos reales existen fuerzas de fricción que se oponen al movimiento y ocasionan disipación de la energía. Es necesario entonces determinar la forma explícita de dichas fuerzas que debe añadirse a la ecuación (47). La fricción en un fluido está relacionada con una propiedad física denominada viscosidad. Cotidianamente podemos observar cómo se manifiesta esta propiedad en diversas situaciones. En las aspas de un ventilador es común encontrar polvo, a pesar de que podría esperarse que el aire en rápido movimiento lo desplazara. Lo que sucede es que el aire que se encuentra justo sobre la superficie del aspa tiene una velocidad cero relativa al aspa de manera que las partículas finas de polvo no son removidas. Es decir, el aire (y cualquier fluido real) se adhiere a las superficies sólidas por el hecho de tener una viscosidad distinta de cero, por lo que una teoría que pretenda describir a los fluidos reales debe considerar este hecho. En un fluido incompresible (i.e. un fluido con densidad constante), la viscosidad está involucrada con los esfuerzos cortantes presentes en un fluido en movimiento. Para cuantificar el efecto de estos esfuerzos, consideremos el siguiente experimento. Supongamos que tenemos dos superficies sólidas planas y paralelas con una capa de agua entre ellas, como se muestra en la figura Fig. 34.
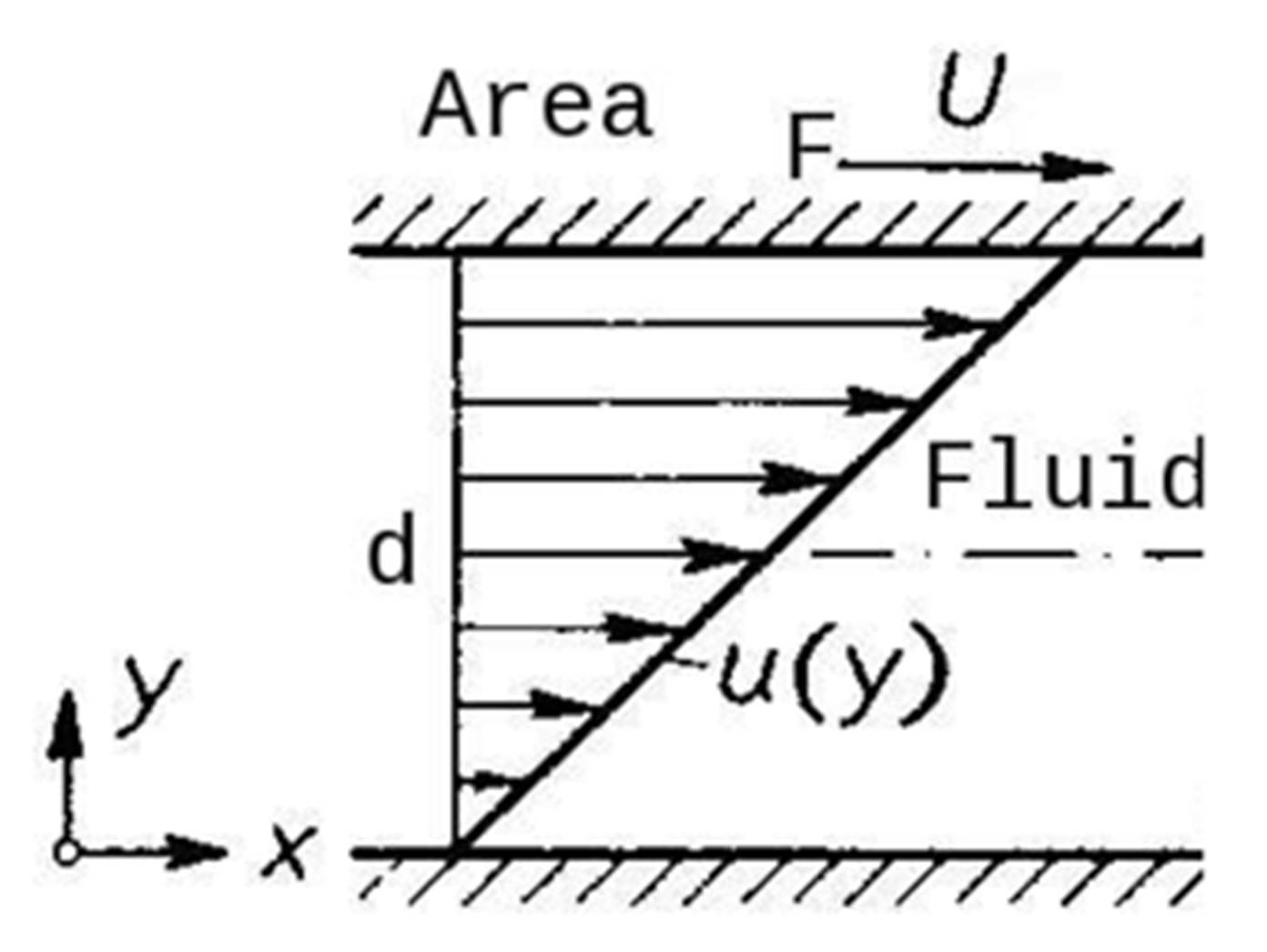
Fig. 34 Fluido viscoso confinado entre dos superficies sólidas planas y paralelas. La superficie superior se desplaza en dirección
La superficie inferior se encuentra fija mientras que la superior, que descansa en la capa de líquido, puede desplazarse en dirección
Entonces, la fuerza tangencial por unidad de área puede expresarse en la forma:
donde el coeficiente de proporcionalidad
Notemos que el lado izquierdo de la ecuación (58) es precisamente el esfuerzo cortante en dirección
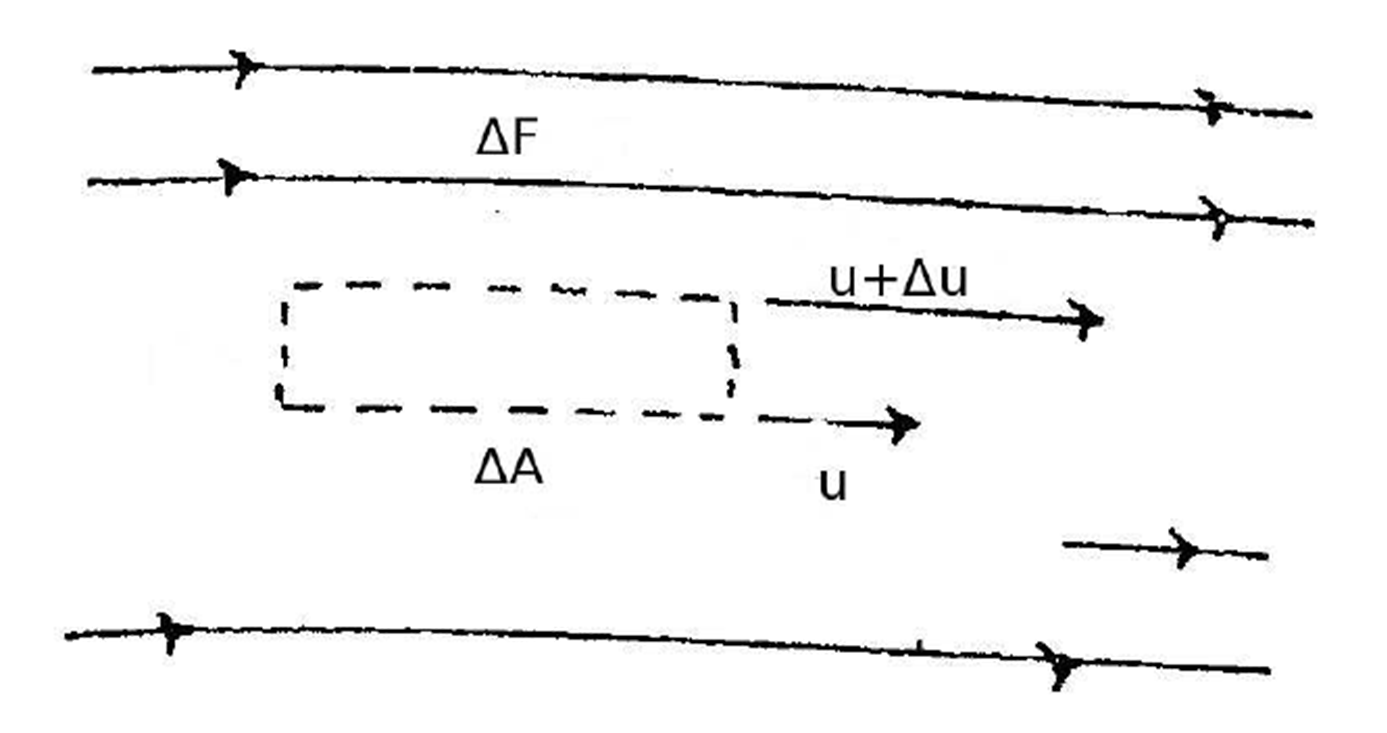
Fig. 35 Esfuerzos cortantes aplicados sobre un volumen de control inmerso en el fluido.#
Entonces, si existe un flujo en dirección
donde
Notemos que para determinar los esfuerzos debemos especificar tanto la dirección en la que se aplica como la dirección normal a la superficie en cuestión. Esto quiere decir que, adicionalmente al esfuerzo
Puede demostrarse que
Debe notarse que el conocer el esfuerzo cortante ejercido por el fluido sobre una pared sólida nos permite conocer la fuerza cortante o tangencial por unidad de área que está actuando sobre dicha pared. Si conocemos el área de la pared podemos entonces determinar la fuerza neta sobre ella.
Ahora queremos determinar la fuerza viscosa por unidad de volumen para sustituirla en la ecuación de balance de momento (47) y obtener la ecuación de movimiento para un fluido real. Aunque la derivación explícita se omitirá por simplicidad, veremos cómo se da el balance de momento en un caso especial y de ahí inferiremos el caso general. Consideremos un flujo bidimensional, en donde todo el fluido se mueve en una sola dirección, digamos de izquierda a derecha en dirección
Consideremos ahora un volumen de control que encierra una pequeña porción de fluido cuya longitud es
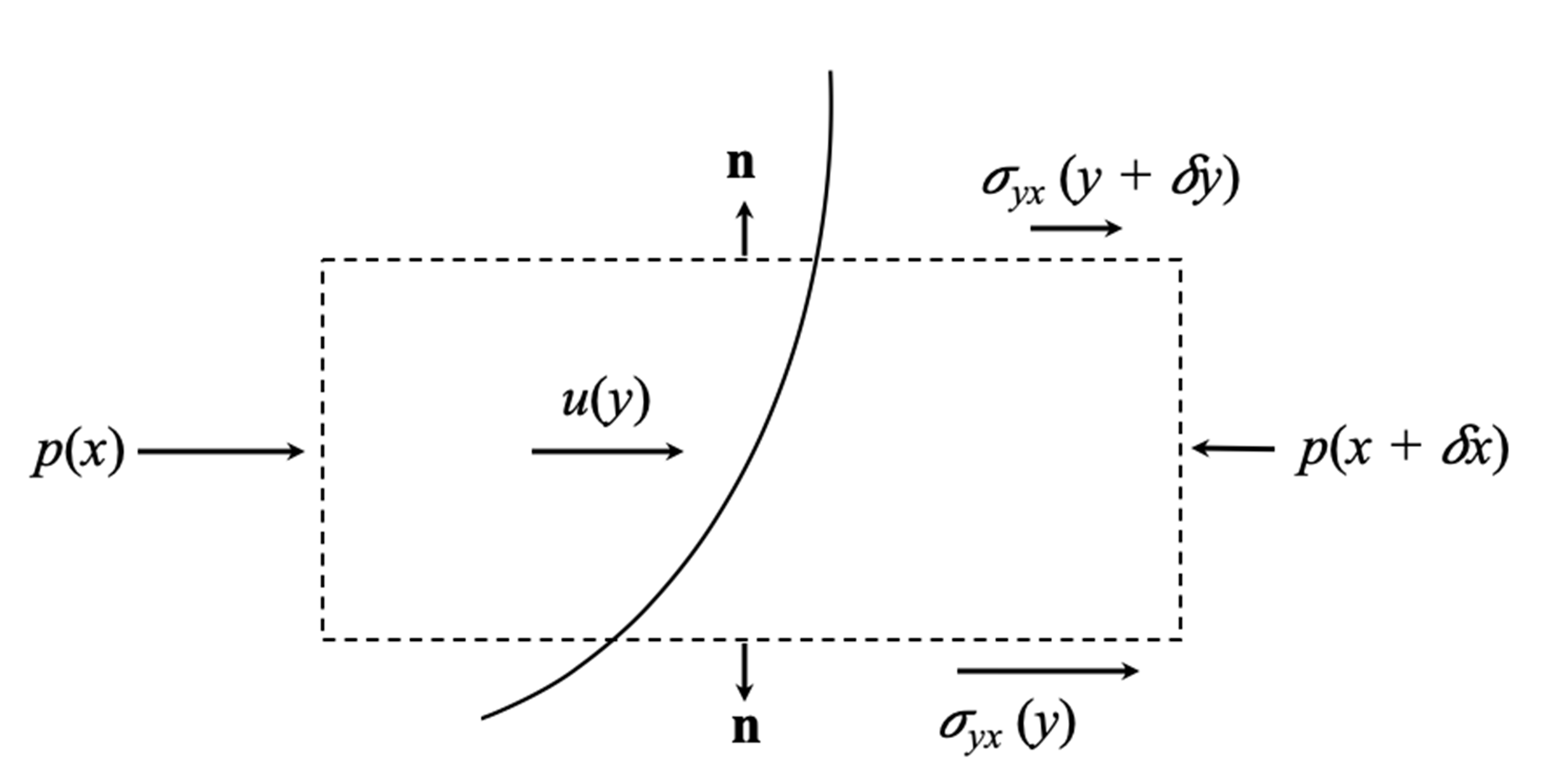
Fig. 36 Las componentes de los esfuerzos de presión y cortantes ejercidos sobre una peque~na porción rectangular de longitud
Mientras que las caras verticales del volumen de control experimentan fuerzas de presión en dirección
Notemos que la normal en la superficie superior del volumen de control apunta hacia el fluido circundante en dirección
mientras que en la cara inferior
Por tanto, sustituyendo en la ecuación (60) y dividiendo entre
Tomando los límites
Si seguimos el mismo procedimiento para resolver las fuerzas en la dirección
ya que no existen esfuerzos cortantes en dirección
Estos ejemplos simplificados nos muestran que la fuerza viscosa involucra a las segundas derivadas del campo de velocidades. En el caso general, puede demostrarse formalmente que, para un fluido Newtoniano incompresible, la fuerza viscosa por unidad de volumen tiene la forma:
donde aparece el operador Laplaciano:
La ecuación de Navier-Stokes
Podemos entonces escribir las ecuaciones que gobiernan el movimiento de un fluido Newtoniano incompresible, es decir,
donde hemos incluido la ecuación de continuidad (64) y sustituido la expresión (63) en la ecuación (47) para obtener (65) que se conoce como la
donde estamos suponiendo que la gravedad actúa en dirección